 Our set-up for collecting real-world images.
Our set-up for collecting real-world images.
We built a setup for easily collecting and labelling real-world data and created a system for generating synthetic data by simulating real-world conditions.
We use different camera sensors mounted on an industrial robot, to capture multi-view images of diverse scenes.
Our set-up for collecting real-world images.
We use objects of 6 categories, with different shapes and material properties.
 Objects types used.
Objects types used.
Objects are placed on 3 different types of carriers.
 Objects carriers used.
Objects carriers used.
Precise calibration and consistent camera viewpoints allow jointly labelling all images of a scene. We developed a new public tool to facilitate this task.
Using a Unity project, we generate high-fidelity synthetic data. Real-world conditions are carefully simulated. This data generation setup leads to synthetic images that strongly resemble their real-world counterparts. A large amount of additional data is generated by varying object materials, compositions and lighting.
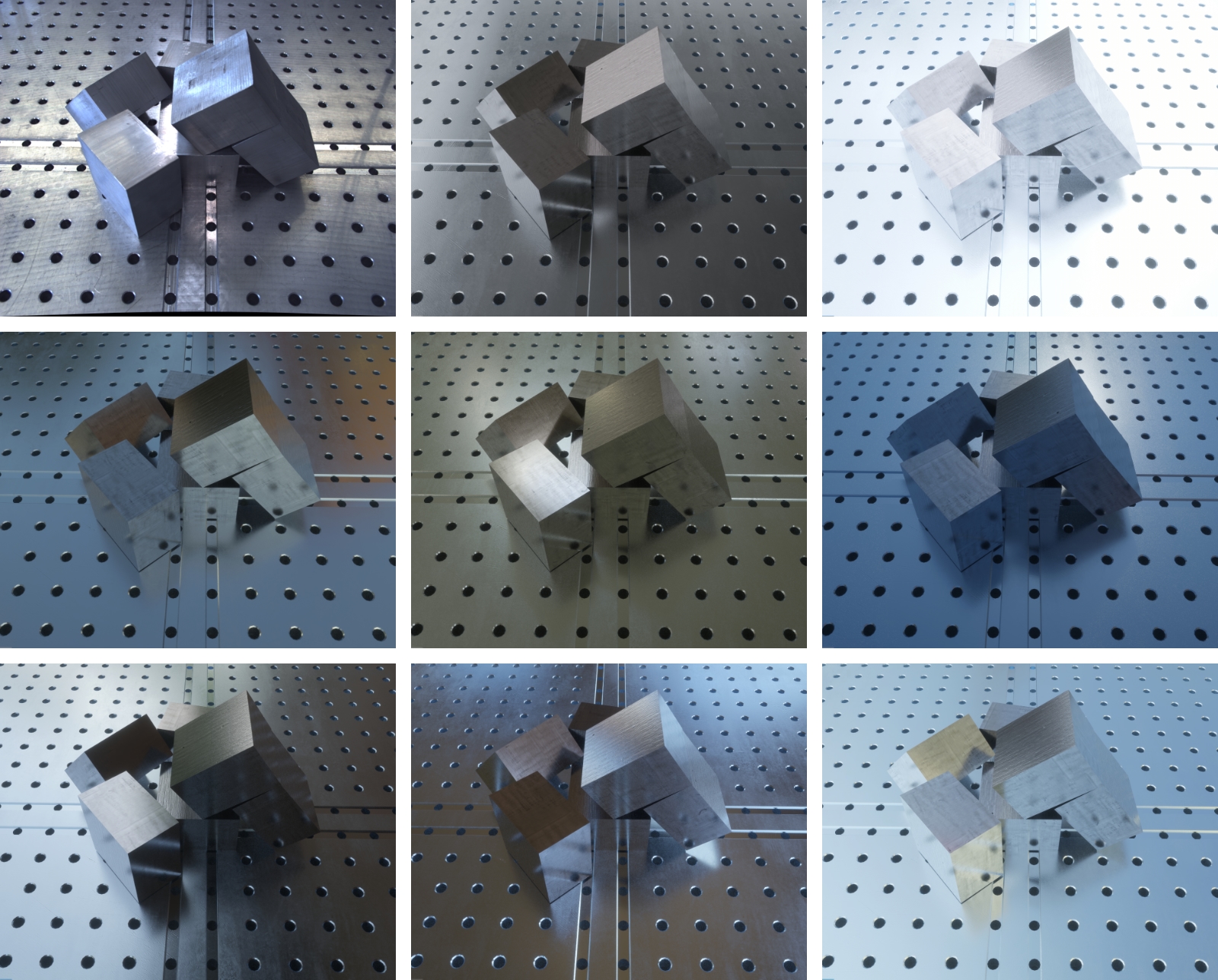 Real-world image (top-left) and corresponding synthetic images with varying lighting conditions.
Real-world image (top-left) and corresponding synthetic images with varying lighting conditions.